Raspberry Pi Pico: Blink-Geschwindigkeit einer LED mit einem 2-Achsen-Joystick einstellen (KY-023)
Das 2-Achsen-Joystick vom Typ KY-023 kann auf der X-Achse und der Y-Achse und auch dazwischen frei bewegt werden. Zusätzlich kann in der Mittelstellung der Joystick als Taster genutzt werden.
Mit dem folgenden Aufbau wollen wir nur die Y-Achse, also hoch und runter verwenden. Wir verwenden diese Achse, um die Blink-Geschwindigkeit der Onboard-LED einzustellen.
Aufbau und Bauteile
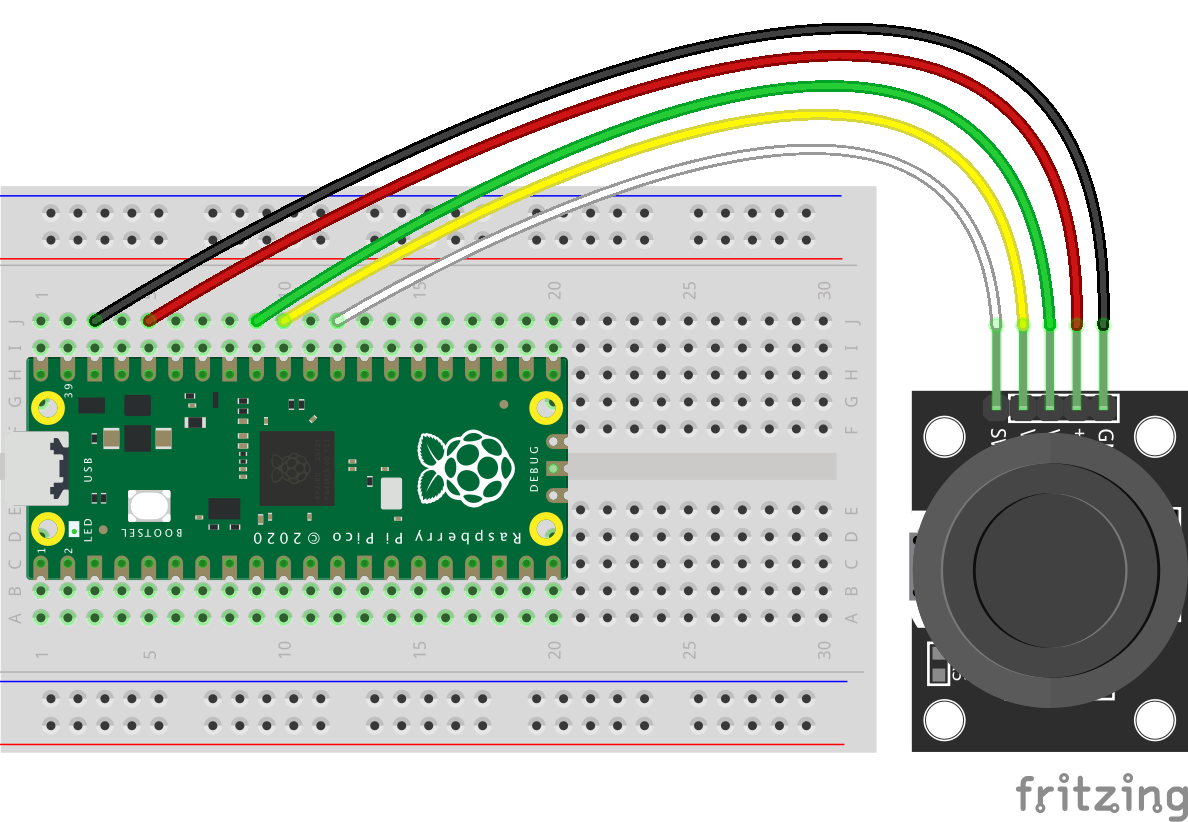
| Raspberry Pi Pico | KY-023 | |
|---|---|---|
| Pin 38 | GND | GND |
| Pin 36 | 3V3 OUT | VCC |
| Pin 32 | GPIO 27 (ADC1) | VRX |
| Pin 31 | GPIO 26 (ADC0) | VRY |
| Pin 29 | GPIO 22 | SW |
Schnell und einfach alle Bauteile zusammen bestellen
Programmcode
Nach der Initialisierung des GPIO-Eingangs für den Drucktaster und den ADC für die Y-Achse des Joysticks wird die Onboard-LED mit einem Timer an- und ausgeschaltet. Das heißt, die LED blinkt.
In einer Endlos-Schleife wird die Position des Joysticks auf der Y-Achse mit dem ADC-Eingang laufend gelesen und dieser Wert in eine Periodendauer umgerechnet, das der Blink-Geschwindigkeit entspricht. Mit dieser Blink-Geschwindigkeit wird der Timer neu gesetzt.
# Bibliotheken laden
from machine import ADC, Pin, Timer
from time import sleep
# Start-Blink-Geschwindigkeit
value_p = 300
# Initialisierung: GPIO25 als Ausgang
led = Pin(25, Pin.OUT)
# Initialisierung: ADC1 (GPIO27)
adc1 = ADC(1)
value = adc1.read_u16()
# Initialisierung: Timer
blink = Timer(mode=Timer.PERIODIC, period=value_p, callback=lambda t: led.value(not led.value()))
# Wiederholung (Endlos-Schleife)
while True:
# ADC0 als Dezimalzahl lesen (vertikal)
y = adc1.read_u16() + 1
#print('ADC1:', y)
# Auswerten und umrechnen
if y < 29000 and y < value:
value = y
value_p = int(y / 128) + 1
# Timer ändern
blink.deinit()
blink.init(mode=Timer.PERIODIC, period=value_p, callback=lambda t: led.value(not led.value()))
elif y > 32000 and y > value:
value = y
value_p = int(y / 128)
# Timer ändern
blink.deinit()
blink.init(mode=Timer.PERIODIC, period=value_p, callback=lambda t: led.value(not led.value()))
#print(value, '/', value_p)
sleep(0.2)
Weitere verwandte Themen:
- Raspberry Pi Pico: 2-Achsen-Joystick ansteuern und Position auswerten (KY-023)
- Raspberry Pi Pico: Helligkeit einer LED mit einem 2-Achsen-Joystick einstellen (KY-023)
- Raspberry Pi Pico: Helligkeit einer LED mit einem Rotary Encoder einstellen (KY-040)
- Raspberry Pi Pico: Blink-Geschwindigkeit einer LED mit einem Rotary Encoder einstellen (KY-040)
Frag Elektronik-Kompendium.de
Hardware-nahes Programmieren mit dem Raspberry Pi Pico und MicroPython
Das Elektronik-Set Pico Edition ist ein Bauteile-Sortiment mit Anleitung zum Experimentieren und Programmieren mit MicroPython.
- LED: Einschalten, ausschalten, blinken und Helligkeit steuern
- Taster: Entprellen und Zustände anzeigen
- LED mit Taster einschalten und ausschalten
- Ampel- und Lauflicht-Steuerung
- Elektronischer Würfel
- Eigene Steuerungen programmieren
Online-Workshop: Programmieren mit dem Raspberry Pi Pico

Gemeinsam mit anderen und unter Anleitung experimentieren? Wir bieten unterschiedliche Online-Workshops zum Raspberry Pi Pico und MicroPython an. Einführung in die Programmierung, Sensoren programmieren und kalibrieren, sowie Internet of Things und Smart Home über WLAN und MQTT.
Besuchen Sie unser fast monatlich stattfindendes Online-Meeting PicoTalk und lernen Sie uns kennen. Die Teilnahme ist kostenfrei.



