Raspberry Pi Pico: Blink-Geschwindigkeit einer LED mit einem Rotary Encoder einstellen (KY-040)
Ein Rotary Encoder bzw. Drehschalter dient zum Einstellen von Parametern und Werten. Hier wollen wir die Blink-Geschwindigkeit einer LED einstellen.
Wenn das Dein erster Versuch mit einem Rotary Encoder vom Typ KY-040 ist, dann solltest Du Dich zuerst mit diesem Bauteil und seinen Besonderheiten vertraut machen. Außerdem empfiehlt es sich zuerst mit der Ansteuerung bzw. der Software-seitigen Auswertung des Rotary Encoders zu experimentieren und herauszufinden, was er leisten kann.
- Mehr Informationen zum KY-040 - Drehschalter (Rotary Encoder)
- Drehschalter / Rotary Encoder ansteuern (KY-040)
Aufbau und Bauteile
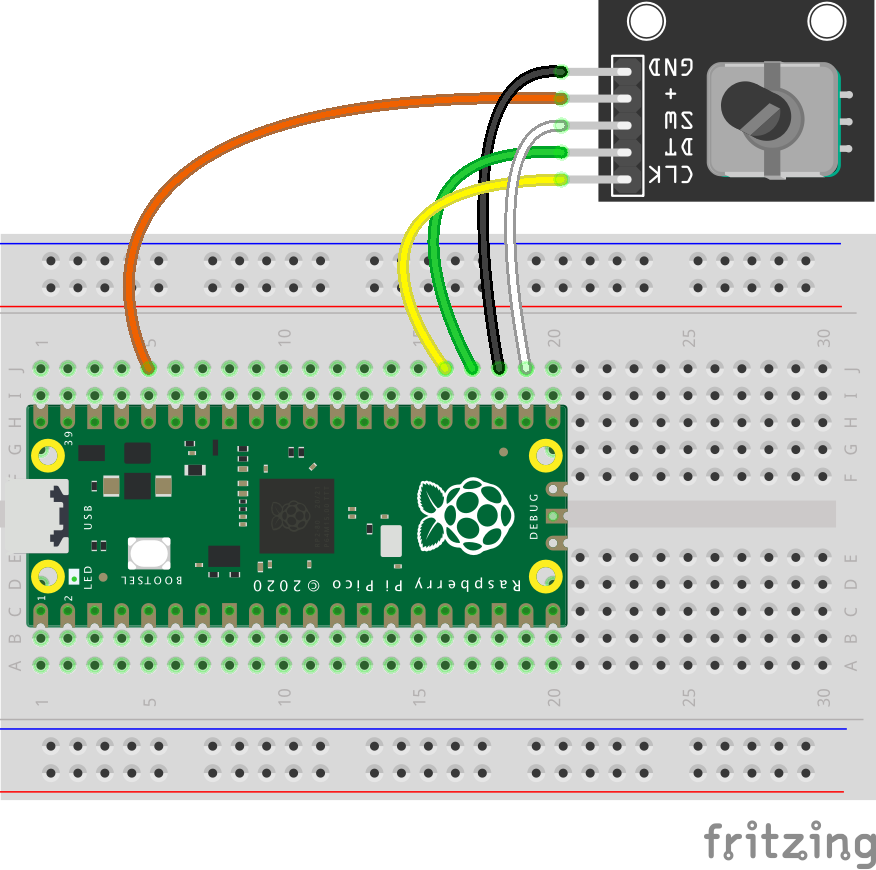
| Raspberry Pi Pico | KY-040 | |
|---|---|---|
| Pin 23 | GND | GND |
| Pin 36 | VCC +3,3V | + |
| Pin 22 | GPIO 17 | SW |
| Pin 25 | GPIO 19 | CLK |
| Pin 24 | GPIO 18 | DT |
Schnell und einfach alle Bauteile zusammen bestellen
Externe Bibliothek für den Drehschalter (Rotary Encoder)
Zur Software-seitigen Ansteuerung bzw. Auswertung des Drehschalter bzw. Rotary Encoders ist eine externe Bibliothek erforderlich, weil keine direkte Unterstützung in MicroPython vorgesehen ist. Die Bibliothek macht die Auswertung des Drehschalters im Programmcode spielend einfach. Dazu muss die Bibliothek in Form einer Datei auf den Raspberry Pi Pico gespeichert werden, damit die Einbindung im folgenden Programmcode funktioniert.
Programmcode
Nach dem Start des Programmcodes blinkt die LED auf dem Raspberry Pi Pico. Durch Drehen des Rotary Encoders kann das Blinken schneller oder langsamer eingestellt werden.
# Bibliotheken laden
from machine import Pin, Timer
from rotary import Rotary
# Start-Blink-Geschwindigkeit
value = 100
# Initialisierung von GPIO25 als Ausgang
led = Pin(25, Pin.OUT)
# Timer initialisieren
blink = Timer(mode=Timer.PERIODIC, period=value, callback=lambda t: led.value(not led.value()))
# GPIOs zum Rotary Encoder
pin_dt = 18
pin_clk = 19
pin_sw = 17
# Initialiserung Rotary Encoder
rotary = Rotary(pin_dt, pin_clk, pin_sw)
# Funktion
def rotary_changed(change):
global value
if change == Rotary.ROT_CW:
value = value - 10
elif change == Rotary.ROT_CCW:
value = value + 10
# Korrektur
if value < 10: value = 10
if value > 1000: value = 1000
print(value)
# Timer ändern
blink.deinit()
blink.init(mode=Timer.PERIODIC, period=value, callback=lambda t: led.value(not led.value()))
# Wenn der Encoder bedient wird
rotary.add_handler(rotary_changed)
Darf es ein bisschen mehr sein?
So eine LED ist natürlich viel zu langweilig. Vielleicht könnte Dich eine ganze Reihe von RGB-LEDs begeistern. Das Experimentieren mit einem WS2812-LED-Moduls macht richtig Laune.
Weitere verwandte Themen:
- Raspberry Pi Pico: Onboard-LED blinken lassen
- Raspberry Pi Pico: Blink-Geschwindigkeit einer LED mit einem 2-Achsen-Joystick einstellen (KY-023)
- Raspberry Pi Pico: Helligkeit einer LED mit einem Rotary Encoder einstellen (KY-040)
- Raspberry Pi Pico: WS2812-Lauflicht-Geschwindigkeit mit Rotary Encoder einstellen (KY-040)
- Raspberry Pi Pico: Funktionsauswahl mit WS2812-RGB-LEDs und Rotary Encoder programmieren (KY-040)
- Raspberry Pi Pico: Servo-Motor SG90 mit Drehschalter KY-040 steuern
Frag Elektronik-Kompendium.de
Hardware-nahes Programmieren mit dem Raspberry Pi Pico und MicroPython
Das Elektronik-Set Pico Edition ist ein Bauteile-Sortiment mit Anleitung zum Experimentieren und Programmieren mit MicroPython.
- LED: Einschalten, ausschalten, blinken und Helligkeit steuern
- Taster: Entprellen und Zustände anzeigen
- LED mit Taster einschalten und ausschalten
- Ampel- und Lauflicht-Steuerung
- Elektronischer Würfel
- Eigene Steuerungen programmieren
Online-Workshop: Programmieren mit dem Raspberry Pi Pico

Gemeinsam mit anderen und unter Anleitung experimentieren? Wir bieten unterschiedliche Online-Workshops zum Raspberry Pi Pico und MicroPython an. Einführung in die Programmierung, Sensoren programmieren und kalibrieren, sowie Internet of Things und Smart Home über WLAN und MQTT.
Besuchen Sie unser fast monatlich stattfindendes Online-Meeting PicoTalk und lernen Sie uns kennen. Die Teilnahme ist kostenfrei.



